MARS TERRAIN
See Through To The Future Of Colonisation
I sought particular inspiration for Mars as it was a planet integral to the space race in the decade to come. I read up and researched many different areas of the planet and picked the ones that were colonisable and had research and attraction value. I utilised real life satellite imagery to model the volcanoes and Valles Marineris with as much detail as possible, taking into account its vast size and using factor scaling to bring it within the size of the Unity 3D world. I preserved the realism of the entire scene through using dust particle systems for the Martian Desert and using snow particle systems for the north pole of Mars where the Planum Boreum is located.

Planum Boleum(1)

Argyre Planitia

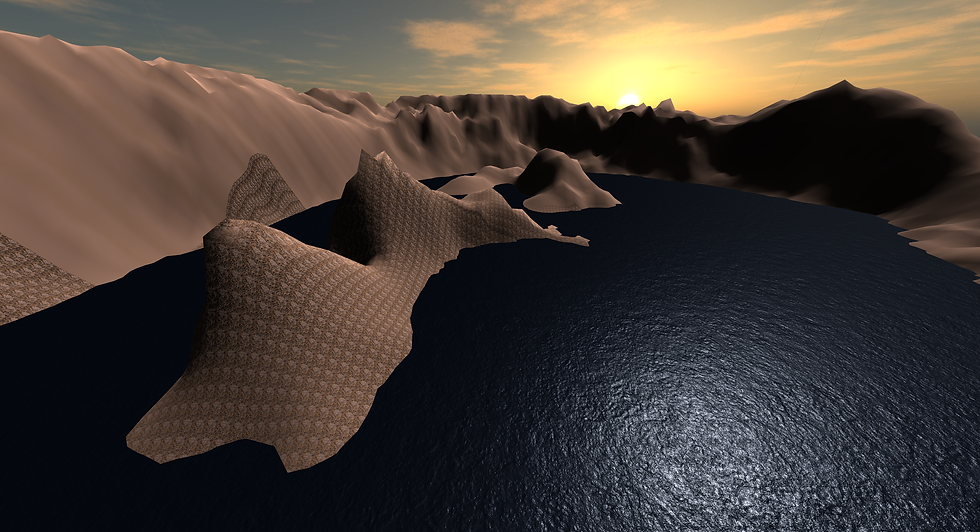
Valles Marineris

Elysium Mons

Gale Crater Lake

Olympus Mons(1)
Gale Crater Lake(2)

Gale Crater Lake(3)

Olympus Mons Player View

Planum Boleum(2)

Olympus Mons(2)

Planum Boleum Player View
HYPERPOD
A Faster And More Efficient Way To Travel On Mars
This is a better form of transportation taking into account the effects of gravity. The targets are placed on a tag and stored into a list. The dot product of the players position towards the target and the forward vector are multiplied. These values are the cosines of the angles in between the forward direction of the Hyperpod and the direction towards the target.The list is sorted by descending due to the inverse relationships between the value of dot products and the magnitude of the angle between both game objects. The first value was taken in the list which was the smallest value hence indicating the shortest distance between the player and the target. The magnitude of the directional vector between the target and players position is taken into account and multiplied by a scalar constant to ensure that the desired velocity is constantly measure to allow efficiently optimised transport at a constant height. The rotation of the Hyperpod is towards the target using an attached Rigidbody that aligns the Hyperpod towards the z and x axis of the target by rotating it around through a constant turn parameter.
I then used a waypoint system to generate all the points that the pod was supposed to pass through. I used linear interpolation from the pod to the selected target to generate the positions of the other points along the line connecting the target to the capsule. I made them the child of my primary game object and placed them into an array. I used interpolation to move the pod from one node to the adjacent node along an imaginary line. I also used Quaternion.Slerp to interpolate the rotation of the transforms such that they all faced the same direction. I used an enumerator to switch between linear and Catmull interpolation to ensure smooth rendering of the camera. This was done using a switch method in C#, and cached to a method in the update function, to link all of the functions directly to the pod during run time.
Future applications of this can be implemented through using a parabolic and depressurised vaccum tube. This tube uses the force of gravity to propel the Hyperpod forward using only electronic levitation to keep it afloat in the tube. Air resistance is negligent in the tube allowing it to go at the fastest speed possible before applying a decelerating force when it is near the target station.
A Unique Levitating Form Of Transportation On Mars
HOVERCRAFT
A hovercraft on Mars where the user is presented with an interactive UI panel in front of him either to tour the entire perimeter of Mars in a polygon shape where the user is able to input a distinct radius and number of vertices. Through this, a waypoint system is programatically created such that the hovercraft can follow along the path with each vertice of the polygon being the respective waypoint. A startpoint game object is created at the players position and all the vertices positions are stored into an array as the children of the startpoint position to set up the entire waypoint system.
This can be further improved by placing an interactive UI panel where the user is able to sketch out the path in which he chooses using a swipe interface so that the hovercraft is able to track the 3D coordinates of its current position and the desired path it wants to take. This is done by using real-time and realistic 3D waypoints as a gauge of the trajectory of the path.
MARS USER INTERFACE
A Different Way Of Viewing
I used Unity's standard 2D Sprite's and UI development tools to do up the entire information menu. I applied Unity Engine Animations for smooth transitions between each menu through sliding in and out of the screen, making use of the animation controller ability. I also added button animations that light up when the cursor is hovering over the button. Lastly, I applied Sprite's to each individual section such that users will be able to get a realistic view of the terrain that they are currently previewing.

Mars Information Menu Layout

Valles Marineris Description

Tharsis Region
Mars Information Menu Layout